Guida per configurare il Marlin
Come sappiamo questo software è in costate aggiornamento, ma configurare il Marlin, una volta imparato è simile tra le varie stampanti o tra le varie versioni . Questa guida è una traccia che non può tenere conto di eventuali aggiunte future. Jim Brown ha spiegato ogni linea in modo abbastanza chiaro. E noi ve la riproponiamo.
La guida è per una stampante specifica, ma può essere utilizzata da qualsiasi stampante su modello Prusa, quindi con piatto mobile in Y. Questa guida è fatta Ad Hoc per Tevo Tarantula. Per chi non la conoscesse, è una stampante basata sul modello Prusa i3. Quindi questa guida è utilizzabile da qualsiasi possessore di una stampante simil Prusa (forse il 90% delle stampanti in commercio) basta variare qualche valore, ed è utilizzabile per qualsiasi stampante con questa geometria. I valori a cui dobbiamo stare più attenti sono: le dimensioni del piatto, il numero passi dell’estrusore e la tipologia di scheda in uso.
Se volete variare il vostro Marlin, con una nuova versione, o con una versione più performante è sempre consigliabile scaricare la versione Ufficiale dal sito Web del produttore (se è presente), oppure dal Gruppo Facebook dedicato alla vostra stampante. E da quella base imparare con questa guida a modificare i vari valori. Per arrivare al risultato desiderato!
Se prima di iniziare avete difficoltà a collegare la vostra stampante al PC vi consiglio di seguire la guida apposita: Collegare la stampante al PC e tornare a questo punto solo in seguito!
Iniziamo a configurare il Marlin
- Scaricare arduino ide su https://www.arduino.cc/en/Main/Software e installarlo
- Scaricare la 1_1_X (click su “clone or download”) da https://github.com/JimBrown/MarlinTarantula – per Tevo Tarantula, oppure la versione di Marlin per la vostra stampante.
- Aprire il file marlin.ino in “strumenti” selezionare “Mega2560” sia in “Scheda” che in “Processore” sempre in “strumenti” selezionare la porta dove è fisicamente collegata la stampante tramite cavo USB.
- Selezionare la scheda “configuration.h”. (Qui si entra nel vivo)
La scheda configuration.h
La prima sezione di questa scheda raccoglie la maggior parte delle opzioni.
Per rendere attiva una linea si devono cancellare le due // che precedono la linea, al contrario , inserendo le due // si renda tale linea inattiva. Questa operazione in gergo viene detta “commentare o decommentare” una linea.
Facciamo un esempio pratico: configuro il mio marlin e lo carico in macchina. Accendo e il motore Y gira al contrario. ovvero cerca l’endstop dal lato opposto di dove sta effettivamente. Torno su marlin e vedo che la riga del motore Y è: “//#define CHANGE_Y_DIRECTION // —> If your bed homes in the wrong direction (it should move front to back) enable this.
Quindi basta togliere le due // e il motore girerà dal verso giusto.
Descrizione delle singole righe per configurare il Marlin
A questo punto diventa tutto abbastanza intuitivo scorriamo insieme la scheda e vediamo via via quello che incontreremo. Innanzitutto se ho il large bed tolgo le due // sulla linea apposita.
Le linee che seguono trattano, come descritto nell’esempio, il senso di rotazione dei motori, tipo di hotend, schermo ed eventualmente doppio Z gestito da due motori.
1) #define NOZZLE_X 0 #define NOZZLE_Y descrivono l’offset dell estrusore. Utile per centrare le stampe sul piatto.
2) #define Z_HOMING_HEIGHT 5 Descrive quanto si alza la Z dopo l’HomeZ (in questo caso 5mm).
3) #define E0_STEPS 100 // Stock extruder. Se hai un Titan, prova ad iniziare con 400 e quindi procedi con la calibrazione di fino. Questa riga configura gli Estep/mm dell estrusore.
4) #define CHANGE_E0_DIRECTION // Questo comando definisce il senso di rotazione del motore, se il motore dell’estrusore gira al contrario devi toccare qui.
5) #define Z_STEPS 1600 // Stock lead screw, configura gli Estep/mm del motore Z. Le stampanti Tevo hanno normalmente viti madre che salgono di 2mm ogni giro. Le altre marche di stampanti hanno viti da 8mm ogni giro, quindi questo valore è da dividere per 4.
Andiamo avanti…
Seguono le linee del BLTouch o del sensore verde (SN04). Togliere le due // su quella che interessa in caso di EndStop Z meccanico (microswitch stock) lasciarle tutte inattive.
Seguono le linee per il metodo di livellamento del piatto. Togliere le due // su quella che interessa.
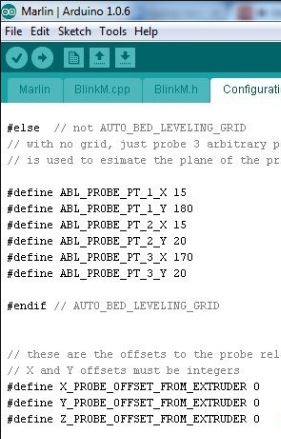
A seguire ci sono le linee che descrivono l’offset del sensore Z rispetto E0 (estrusore), utile per centrare le stampe sul piatto.
#define GRID_POINTS 3 e #define BED_MARGIN
servono per il livellamento automatico del piatto. La prima indica il numero di punti per la curva di livellamento, la seconda il margine da dare, per non far uscire il sensore dal piatto.
Troviamo poi la sezione “Dual extruder”, per chi possiede il doppio estrusore, con relativi Estep/mm e offset di E1 (secondo estrusore)
PID
C’è poi la sezione PID (regolazione temperatura) dell’estrusore e del piatto. Se non sapete cosa sia il PID e come regolarlo vi invito a leggere la guida di Italia 3D Print: regolazione del PID.
Poi troviano babystepping, che servono per microregolazioni in tempo reale e per livellare la Z durante la stampa e continuando arriviamo arriviamo alla linea:
//================= // DO NOT EDIT BELOW THIS LINE UNLESS YOU KNOW WHAT YOU ARE DOING!!!!!!! //========
(non presente in tutte le versioni di Marlin)
 Che vuol dire che, da qua in avanti, se non sai cosa stai facendo allora non farlo!!!
Che vuol dire che, da qua in avanti, se non sai cosa stai facendo allora non farlo!!!
ma noi lo sappiamo!!! (Forse)
scorrere tutto fino a
#define BAUDRATE 115200 (io consiglio di utilizzare 250000) . Se modificate allora ricordatevi di inserire lo stesso dato anche nelle impostazioni di Repetier o simili.
#define CUSTOM_MACHINE_NAME “TEVO Tarantula (EasyConfig)” descrive il nome della stampate che appare sul display. Potete variarlo e mettere un nome a scelta.
Scorrere tutto fino alla sezione:
//============================== Movement Settings ============================//
troviamo le linee:
#if ENABLED(DUAL_EXTRUDER) #define DEFAULT_AXIS_STEPS_PER_UNIT { 80, 80, Z_STEPS, E0_STEPS, E1_STEPS }
#else
#define DEFAULT_AXIS_STEPS_PER_UNIT { 80, 80, Z_STEPS, E0_STEPS }
#endif che definiscono gli Estep/mm di X e Y (come detto Z, E0 ed eventualmente E1 sono all inizio) mettere qua i valori ottenuti dalla calibrazione.
scorrere fino alla linea:
#define Z_PROBE_OFFSET_FROM_EXTRUDER 0
// Z offset: -below +above [the nozzle] defisce la Z-offset. in questo caso 0. Se avete un sensore per Z allora mettete qua il valore di offset.
scorrere fino a:
// @section machine sotto troviamo le misure del piatto
#define X_BED_SIZE 200
#if ENABLED(LARGE_BED)
#define Y_BED_SIZE 280
#else
#define Y_BED_SIZE 200
#endif
in caso di upgrade che le modificassero, inserire qui sopra i valori opportuni
poco più sotto la linea:
#define Z_MAX_POS 200 definisce la Z massima!
scorrere fino a:
//#define SKEW_CORRECTION e, se volete, decommentare a fare la calibrazione. Compensa eventuali fuori bolla e fuori squadra.
scorrere fino a //============================= LCD and SD support ============================ e poco sotto trovate la linea:
#define LCD_LANGUAGE en – se mettete “it” al posto di “en” , avrete LCD in italiano!
Se siete arrivati a questo punto noterete che siete anche arrivati al fondo della scheda configuration.h
A questo punto salvate con nome e caricate in macchina! E’ buona norma caricare a macchina spenta, collegata solamente tramite cavo USB!
Per caricare fare click sull’iconcina a forma di freccia, che trovate in alto a sinistra. Una volta completata la procedura da menu LCD sotto “controllo” dare un “inizializzare EEPROM” e poi “SALVA” accendere la macchina fare un Auto Home e vedere se tutto funziona!

Se avete commesso qualche errore grossolano il software Arduino vi riporterà l’errore nella riga arancione (come in foto qui sopra) nella parte bassa della pagina. Dovrete cercare di risolvere l’errore andando a ri-modificare quanto toccato, cercando di non commettere più lo stesso errore. Non Abbiate timore di chiedere nei gruppi Facebook dedicati alla vostra stampante!
ATTENZIONE: Qualsiasi errore che abbiamo commesso nel configurare il Marlin, dato da distrazione o inesperienza può trasformarsi in potenziale danno!!! Alcune cose infatti potrebbero andare al contrario, come motori. Altre cose potrebbero essere disabilitate…
QUINDI: Mano sulla spina pronti a spegnere tutto in caso di emergenza!!!
Se avete trovato utile questa guida mettete MI PIACE alla nostra pagina Facebook per ricevere aggiornamenti su tutte le novità del Blog! Potete trovare molte altre guide sulla stampa 3D nella nostra sezione GUIDE!
🙂